Newtec VIRLOC VL06

Usage specifics
Parameters (62)
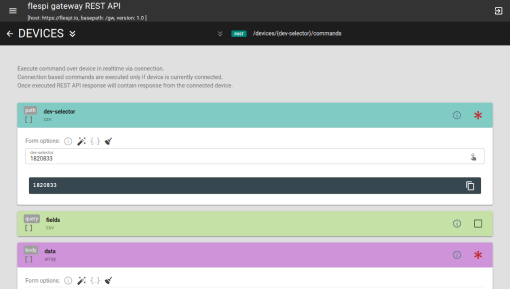
Commands (1)

Newtec VIRLOC VL06
Flespi parses telemetry data from your Newtec VIRLOC VL06 into a standardized JSON and
lets you send commands to Newtec VIRLOC VL06 via API.
Here’s the like of JSON you get
{
"ident": "352625333222111",
"position.altitude": 273.61,
"position.hdop": 0.7,
"position.latitude": 49.069782,
"position.longitude": 28.632826,
"position.satellites": 18,
"server.timestamp": 1650636570.426424,
"timestamp": 1650636570.426424,
"device.type.id": "Newtec VIRLOC VL06",
"channel.id": 1111,
"protocol.id": "newtec"
"engine.ignition.status": true
...
}
How to consume this nice JSON
The easiest way is to make a REST API request like this
curl -X GET --header 'Authorization: FlespiToken XXX' 'https://flespi.io/gw/devices/<device id>/messages'
You can also

Modify messages
Add or remove parameters, inject data from LBS and reverse-geocoding services, etc.
Learn what plugins can do
Aggregate data
Determine trips and stops, catch events, detect geofence ins/outs, and more.
Learn about flespi analytics capabilities ain
number
volts
Voltage on the analog input
Report RTT,
Report RUV04
Report RUV04
battery.voltage
number
volts
Internal battery voltage
Report RTT,
Report RUV00,
Report RUV01
Report RUV00,
Report RUV01
can.brake.pedal.level
number
percentage
Brake pedal push level read from CAN
Report RUV03
can.cruise.status
boolean
CAN cruise control is active
Report RUV03
can.engine.load.level
number
percentage
Calculated engine load level read from CAN
Report RUV03
can.engine.motorhours
number
hours
Total engine motorhours (engine work time) read from CAN
Report RUV03
can.engine.oil.pressure
number
kPa
CAN Engine oil pressure
Report RUV03
can.engine.oil.temperature
number
celsius
Engine oil temperature read from CAN
Report RUV04
can.engine.rpm
number
rpm
Engine RPM read from CAN
Report RUV03,
Report RUV04
Report RUV04
can.engine.temperature
number
celsius
Engine temperature read from CAN
Report RUV03
can.fuel.consumed
number
liters
Fuel volume totally consumed by vehicle read from CAN
Report RUV03
can.fuel.level
number
percentage
Fuel level in tank read from CAN
Report RUV03
can.gear
number
Current gear read from CAN
Report RUV04
can.handbrake.status
boolean
CAN handbrake is pulled up
Report RUV04
can.parking.brake.status
boolean
Parking break status from CAN
Report RUV03
can.pedal.brake.status
boolean
Footbrake pedal is depressed, read from CAN
Report RUV04
can.pedal.clutch.status
boolean
CAN clutch pedal pressed
Report RUV03,
Report RUV04
Report RUV04
can.service.break.status
boolean
Service break status from CAN
Report RUV03
can.throttle.position
number
percentage
Absolute throttle position for corresponding throttle position sensor read from CAN
Report RUV03
can.vehicle.mileage
number
km
Total vehicle mileage read from CAN
Report RUV03,
Report RUV04
Report RUV04
can.vehicle.speed
number
km/h
Vehicle speed read from CAN
Report RUV03,
Report RUV04
Report RUV04
channel.id
number
ID of channel that received a message
device.firmware.version
string
Firmware revision
Report RUV00
device.id
number
ID of device that received a message
device.name
string
Name of device that received a message
device.serial.number
string
Device serial number
Report RUV00,
Report RUV04
Report RUV04
device.type.id
number
ID of device type of device that received a message
din
number
Digital inputs bitmask
Report RGP,
Report RTT,
Report RUV01,
Report RUV04
Report RTT,
Report RUV01,
Report RUV04
driver.id
string
Driver identification card id
Report RUV01
engine.ignition.status
boolean
Engine ignition or ACC status
Report RGP,
Report RTT,
Report RUV01
Report RTT,
Report RUV01
engine.motorhours
number
hours
Total calculated engine motorhours
Report RUV01,
Report RUV04
Report RUV04
engine.oil.pressure
number
Engine oil pressure
Report RUV01
engine.rpm
number
rpm
Engine RPM read
Report RUV01
engine.temperature
number
celsius
Engine temperature
Report RUV01
event.enum
number
Protocol-specific event code
Report RUV00,
Report RUV01,
Report RUV03,
Report RUV04
Report RUV01,
Report RUV03,
Report RUV04
external.powersource.status
boolean
External power source connection status
Report RGP,
Report RTT,
Report RUV01
Report RTT,
Report RUV01
external.powersource.voltage
number
volts
External power voltage
Report RTT,
Report RUV00,
Report RUV01
Report RUV00,
Report RUV01
fuel.level
number
percentage
Fuel level percentage
Report RUV01,
Report RUV04
Report RUV04
gnss.state.enum
number
Protocol-specific GNSS state code. May contain information about GNSS fix status, sleep status, ON/OFF, Overcurrent/protect state.
Report RGP,
Report RTT,
Report RUV01
Report RTT,
Report RUV01
gsm.sim.iccid
string
Integrated Circuit Card Id of SIM card of the Mobile network (GSM, 3G, 4G, LTE, 5G, ...)
Report RUV00
hardware.version
string
Hardware version
Report RUV00
ident
string
Device unique identifier like serial number, IMEI, etc
overspeeding.event
boolean
Overspeeding detected
Report RUV01
overspeeding.speed
number
km/h
GNSS based speed when overspeeding event is triggered
Report RUV01
peer
string
IP:port from which device connecting to the channel
position.direction
number
degrees
Heading angle at position detection moment
Report RGP,
Report RTT,
Report RUV01
Report RTT,
Report RUV01
position.fix.age
number
seconds
Time since the last position fix
Report RGP,
Report RTT,
Report RUV01
Report RTT,
Report RUV01
position.hdop
number
Horizontal dilution of precision
Report RGP,
Report RTT,
Report RUV01
Report RTT,
Report RUV01
position.latitude
number
degrees
Latitude coordinate value
Report RGP,
Report RTT,
Report RUV01,
Report RUV04
Report RTT,
Report RUV01,
Report RUV04
position.longitude
number
degrees
Longitude coordinate value
Report RGP,
Report RTT,
Report RUV01,
Report RUV04
Report RTT,
Report RUV01,
Report RUV04
position.satellites
number
Quantity of satellites used to calculate coordinates for given position information
Report RGP,
Report RTT,
Report RUV01
Report RTT,
Report RUV01
position.speed
number
km/h
Instant speed at position detection moment
Report RGP,
Report RTT,
Report RUV01,
Report RUV04
Report RTT,
Report RUV01,
Report RUV04
protocol.id
number
ID of protocol
protocol.version
string
Protocol version string
Report RUV00,
Report RUV01,
Report RUV03
Report RUV01,
Report RUV03
record.seqnum
number
Registered record sequence number
report.code
string
Report code
rfid.code
string
Hexadecimal code of connected RFID
Report RUV04
segment.max.engine.rpm
number
rpm
Maximum engine RPM on segment
Report RUV01
server.timestamp
number
seconds
Timestamp when server received a message
software.version
string
Software version string
Report RUV00
timestamp
number
seconds
Message timestamp
Report RGP,
Report RTT,
Report RUV00,
Report RUV01,
Report RUV03,
Report RUV04
Report RTT,
Report RUV00,
Report RUV01,
Report RUV03,
Report RUV04
vehicle.odometer
number
Vehicle mileage in base units configured in device (km, miles, 100m etc)
Report RUV01
